こんにちは。でべです。
本日、クラウドファンディング「Makuake」において、とても楽しそうな小型ロボットのプロジェクト「Mini Pupper」(ミニぷぱ)がローンチしました。(公式アカウント)
既に KickStarter において、HK$ 3,904,382 (日本円で総額 5千万円以上!)、世界中で 900人以上の支援者を集めて話題となりました。
これは楽しそう!
今回は、自分で組み立てるバージョンのサンプルをいち早く入手しましたので、組み立てていきたいと思います・・・!
(私はプラモデル感覚で出来ましたが、組み立てが苦手だったり不安な方は、組み立て済みバージョンもあるようです。)
応援購入はこちらから
↓ ↓ ↓ ↓ ↓
初心者もプロも楽しめる!自作できるロボット犬『Mini Pupperミニぷぱ』
https://www.makuake.com/project/mini_pupper

「Mini Pupper」とは?

これです、これです! 小さくてカワイイww
(Pupper: 和訳 「子犬、わんちゃん」)

この中に、サーボモータ 12個、ラズパイ クアッドコア、前面液晶が入っちゃってるんだから
スゴイですね。無線でコントローラとつながります。
ボディのサイズは、小さいペットボトルくらい?
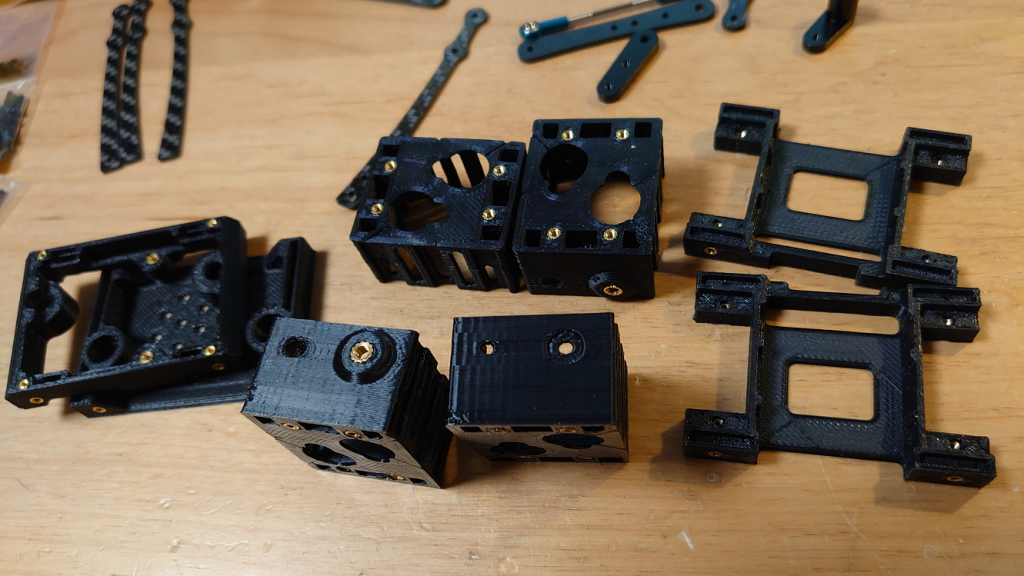
「Mini Pupper」パッケージの中身
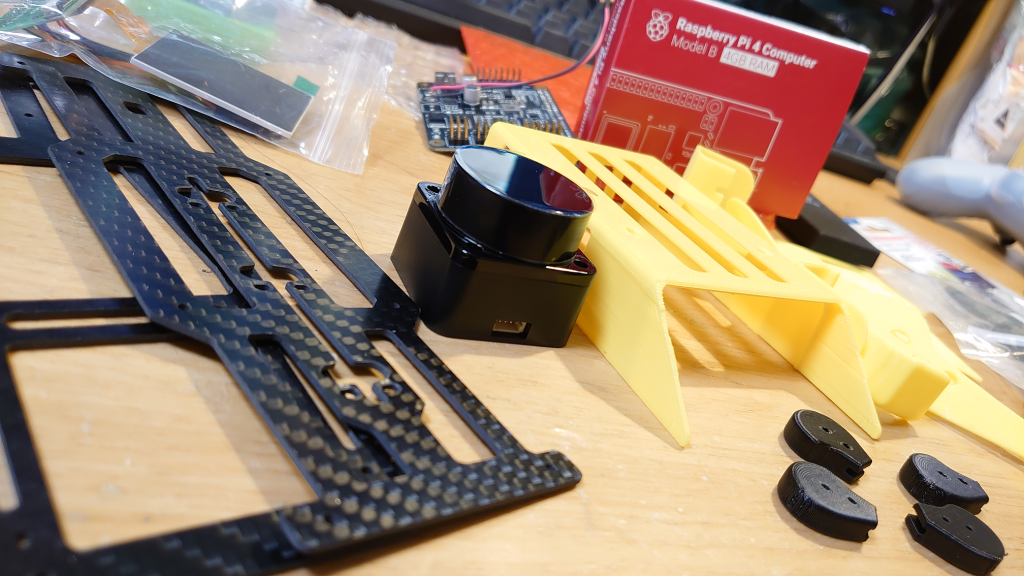
たくさんのパーツがパッケージに含まれていました。
(画像真ん中の黒いのは、オプションの Lidar センサー。)
子供のころの、ミニ四駆を作る時のワクワクした感覚を思い出します・・・w

脚やボディ上下のパーツは、なんとカーボン製!
車やバイクや、高級傘なんかにも使われていると思いますが、とても硬く、軽い!!
Mini Pupper が軽快に動作できる理由は、こういったパーツ単位での高いクオリティから来るのでしょう。
「Mini Pupper」を組み立てよう!
さて早速ですが組み立てていきます。
組み立てガイドを見ながら行えば完成します。
画像とともに説明されてるのでわかりやすいです。
気付いたら夢中で組み立てていて、脚が4本出来上がった時は思わず「うお~~カッコいい~!」と声が出ましたw
ここでは、組み立て中の画像をダイジェスト的に載せてみますね。
● 組み立てガイド
「MiniPupper.Assembly」
● 3Dデータ
閲覧用(← パーツを右クリックで非表示にしたりできて、向きなどを確認するのに便利)
印刷用STLデータ
● 動画
①Soldering iron&threaded insert 720P
②Assemble Leg for Mini Pupper Hacker Version
③Mount Leg for Mini Pupper Hacker Version
④MiniPupper Assembly for StandardCompleteKit
● その他
Makuake プロジェクトページ
github
KickStarter
各種ファイル (Google Drive)
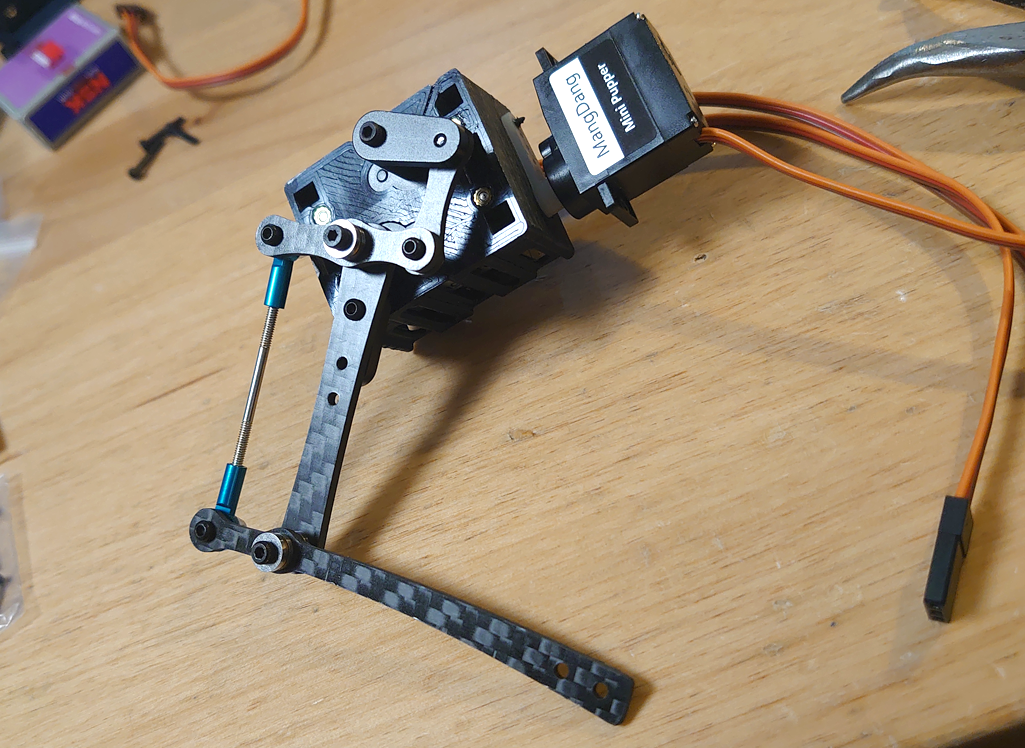
まずは脚から。

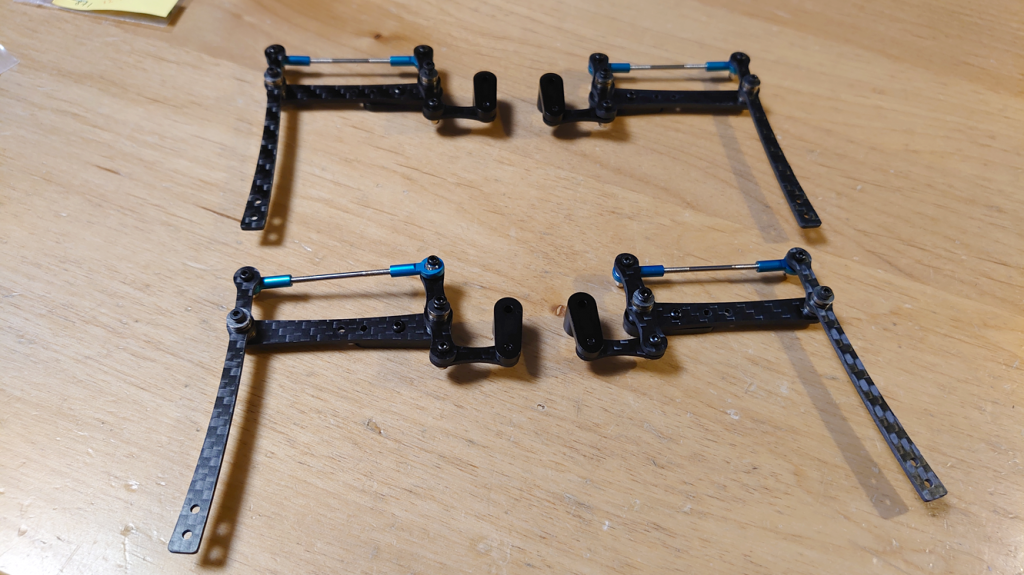
最初に、使う部品をガイド通りに並べてみました。
なるほどなるほど、パズルみたいで面白いw
車のサスペンションのような、青い部品のロッドの長さを、並行するカーボンリンクと同じ長さ(5cm)にするみたい。
1つできれば、あとは同じものを作るだけ。
動画や画像を見て、ネジやベアリング(回るやつ)を順番につければOKでした!
お次は、脚の付け根のサーボブロック。
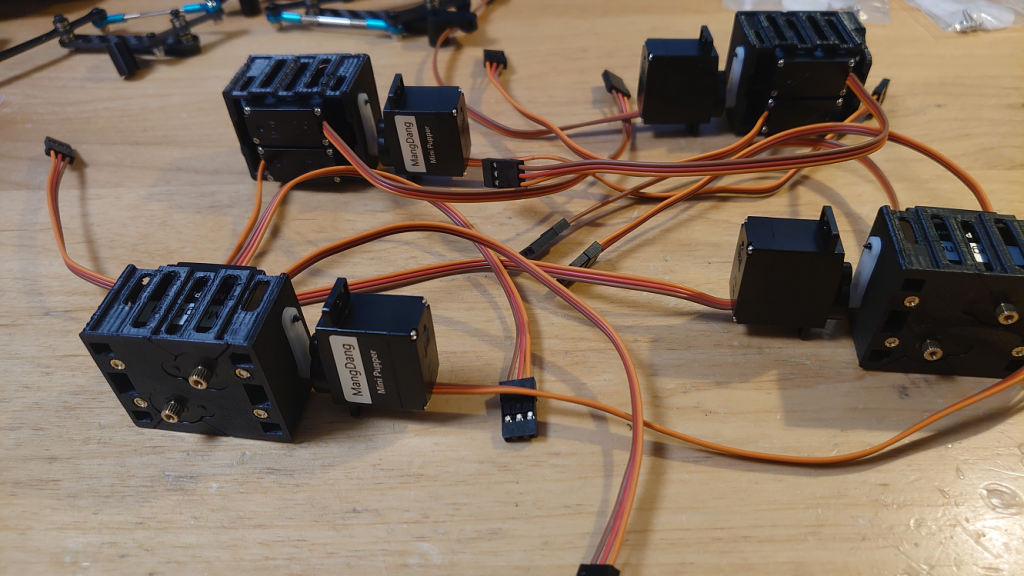
おおおお! カッコいい!!
メカメカしてきました!
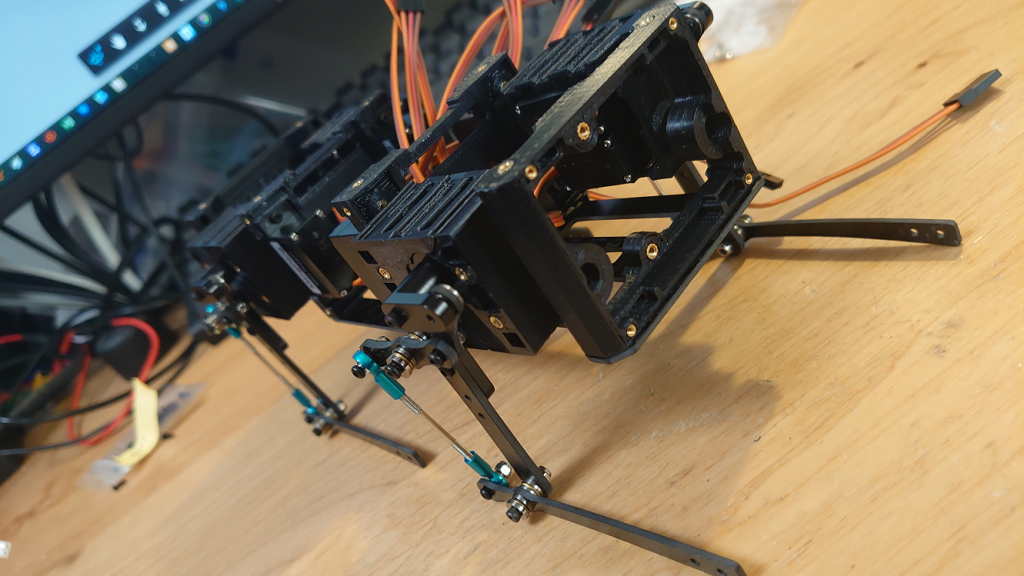
スケルトンフレームw
↑ これは手前のロッドの固定を間違えてますが、あとでも直せました(これ大事w)。
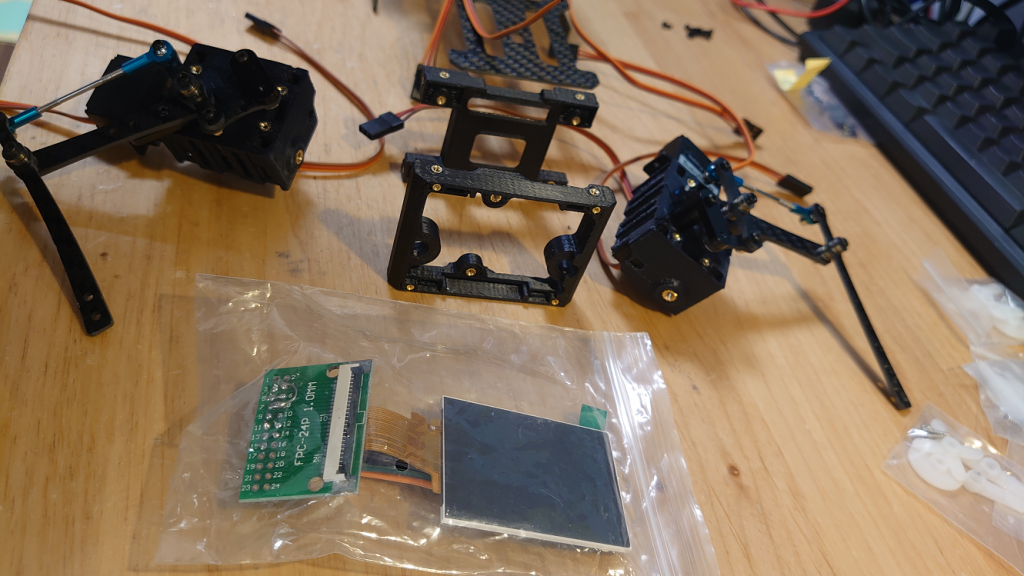
さて、前面液晶の装着です。
薄いフレキケーブルを傷つけないように・・・ドキドキ
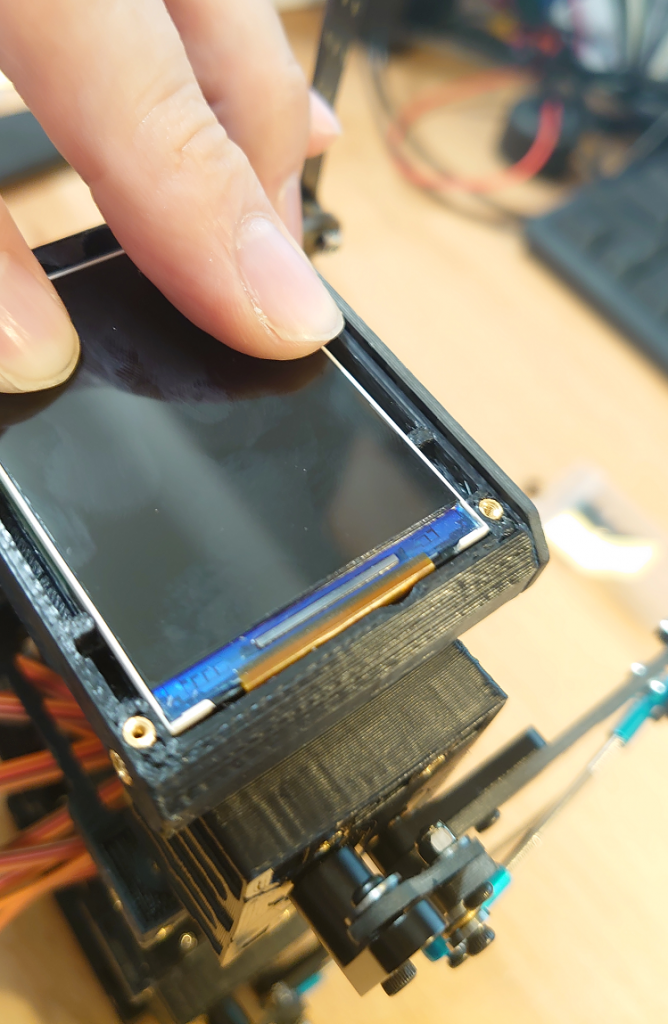
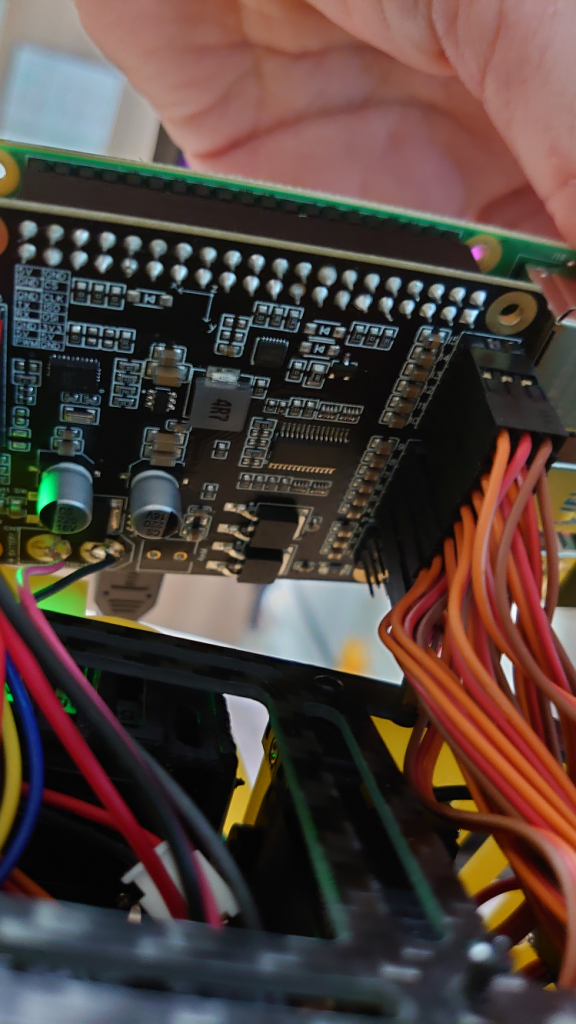
液晶から来るコネクタと内部基板との接続位置・向きも、組み立てガイドと動画を見ながら差しました。
ここを間違えると、前面液晶が映らないと思います。

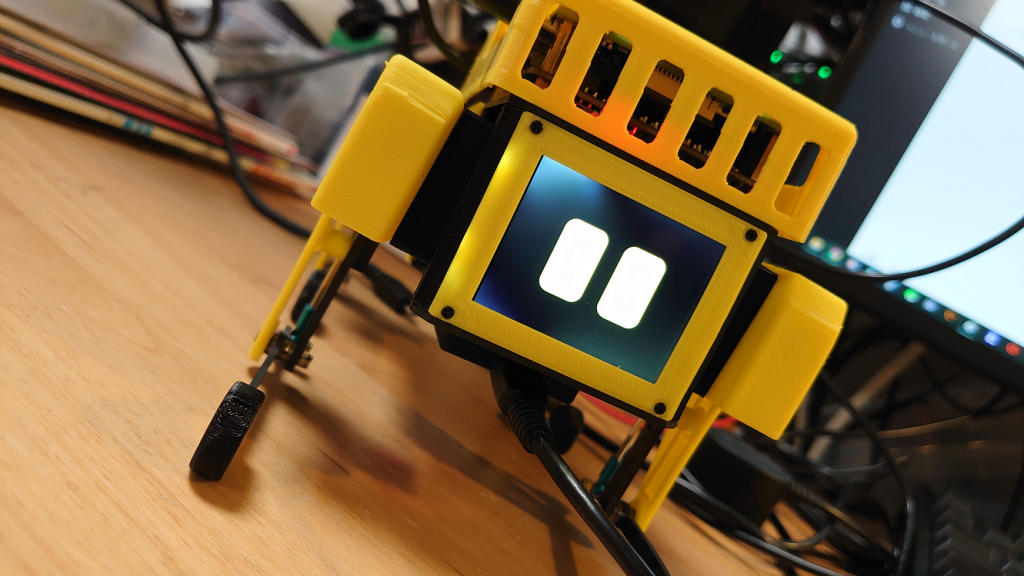
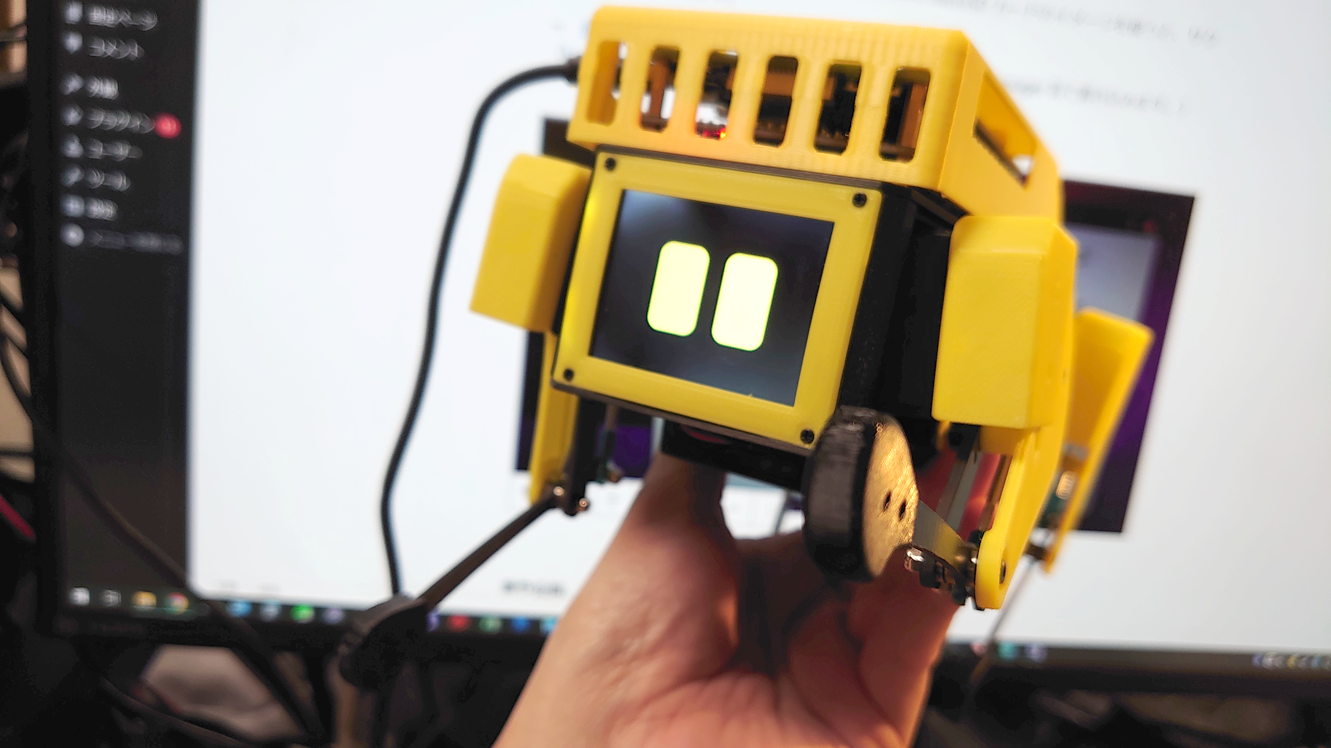
キタキターーー!!
とうとう組みあがりました~~ やったーー!!
組み付ける場所を確認しながらやったので、だいたい3時間くらいかかったかなと思います。
分からない所は動画や3Dデータを見ながら、とりあえず組み付けていきました。
使いこんできたら、きっと自分でもカスタマイズしていくと思うので、ひとまずどんどん進めてみると良いと思います。
続きは・・・!
早く歩かせたいーー!
家や公園、あるいは実家にも連れて行って動かしてみたいですね!
子供たちや周りの人のリアクションが楽しみですw
さて今回は、自分で組み立てる部分の紹介でした。
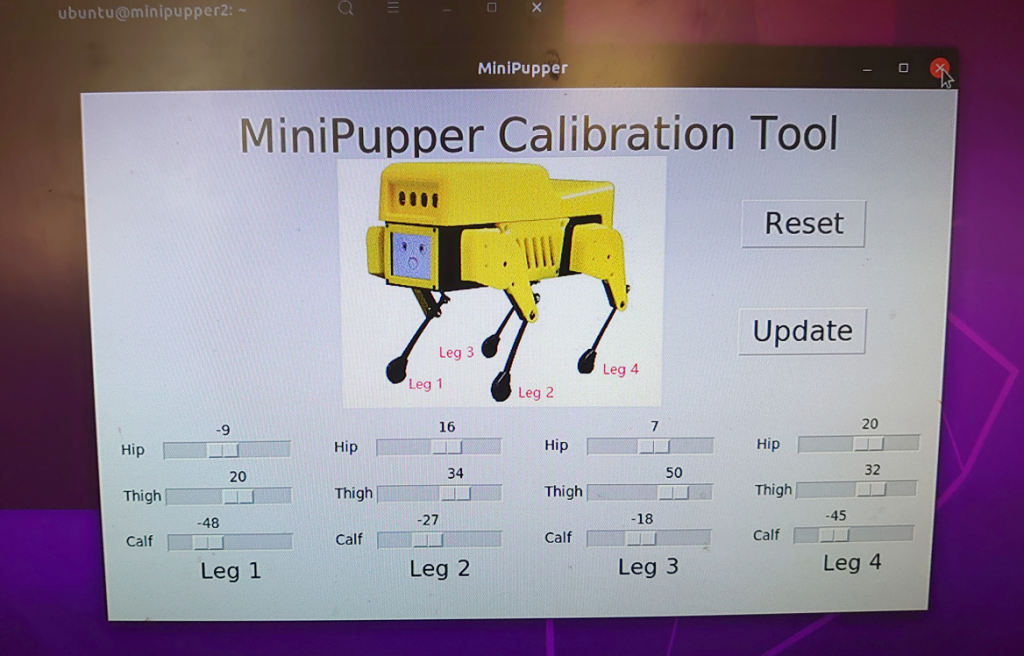
このあとは、ソフトのセットアップ、そしてサーボ位置の調整(キャリブレーション)になります。
といっても、Linux (Ubuntu) セットアップ済みの microSD カードのイメージを使うと、サクッと使い始められます。
PS4 コントローラなら、既に使えるように設定までされています。
(実は先程の完成画像は、液晶に顔が出ていますが、既にソフトを導入済ですw)
→ 最新イメージデータ(zip 解凍し、*.img を Raspberry PI Imager 等で書き込みます。)
(kickstarter 近況報告ページ)

では今回はここら辺で!
ではでは~~
(あると便利な無線キーボードや電動ドライバ)